")
Адаптер 2LIN2CAN v5
Описание выходов адаптера
1. Две LIN шины
1.1 LIN 1 предназначена для управления кнопками руля, адаптер выступает в роли мастера шины
1.2 LIN 2 предназначена для имитации кнопок руля, для передачи данных штатному блоку управления. адаптер выступает ведомым устройством. Данный выход нужен для реализации функции преобразователя одного протокола LIN в другой (LIN2LIN режим)
2. Две CAN шины.
2.1 CAN1
2.2 CAN2
Обе КАН шины могут быть настроены на скорость работы 62,5кбит/c, 100кбит/c, 500кбит/c. Настройка КАН шин производится индивидуально, в не зависимости друг от друга
3. Питание адаптера
3.1 минут питания (земля)
3.2 плюс питания бортовой сети автомобиля (12 В)
4. Выходы для управления нагрузкой с током до 500 мА
Адаптер имеет 7 универсальных выходов, настраиваемых индивидуально, нумерация выходов соответствует маркировке на печатной плате адаптера
5 Резистивный выход 0-50кОм
5.2 Резистивный выход (RA) с программируемых сопротивлением в диапазоне от 0 до 50 кОм. Построен на базе цифрового потенциометра. Подробнее смотрите раздел настройки адаптера
5.1 Дополнительный выход (RA+) имеет два состояние обрыв (бесконечное сопротивление) и замкнут на землю (сопротивление 0 Ом). Ток нагрузки через данный выход не должен превышать 200 мА. Применяется к примеру для резистивного управления магнитолами Pioneer.
6. Цифровой выход для управления магнитолами (протокол NEC)
Используется для ряда магнитол управляемых по протоколу NEC
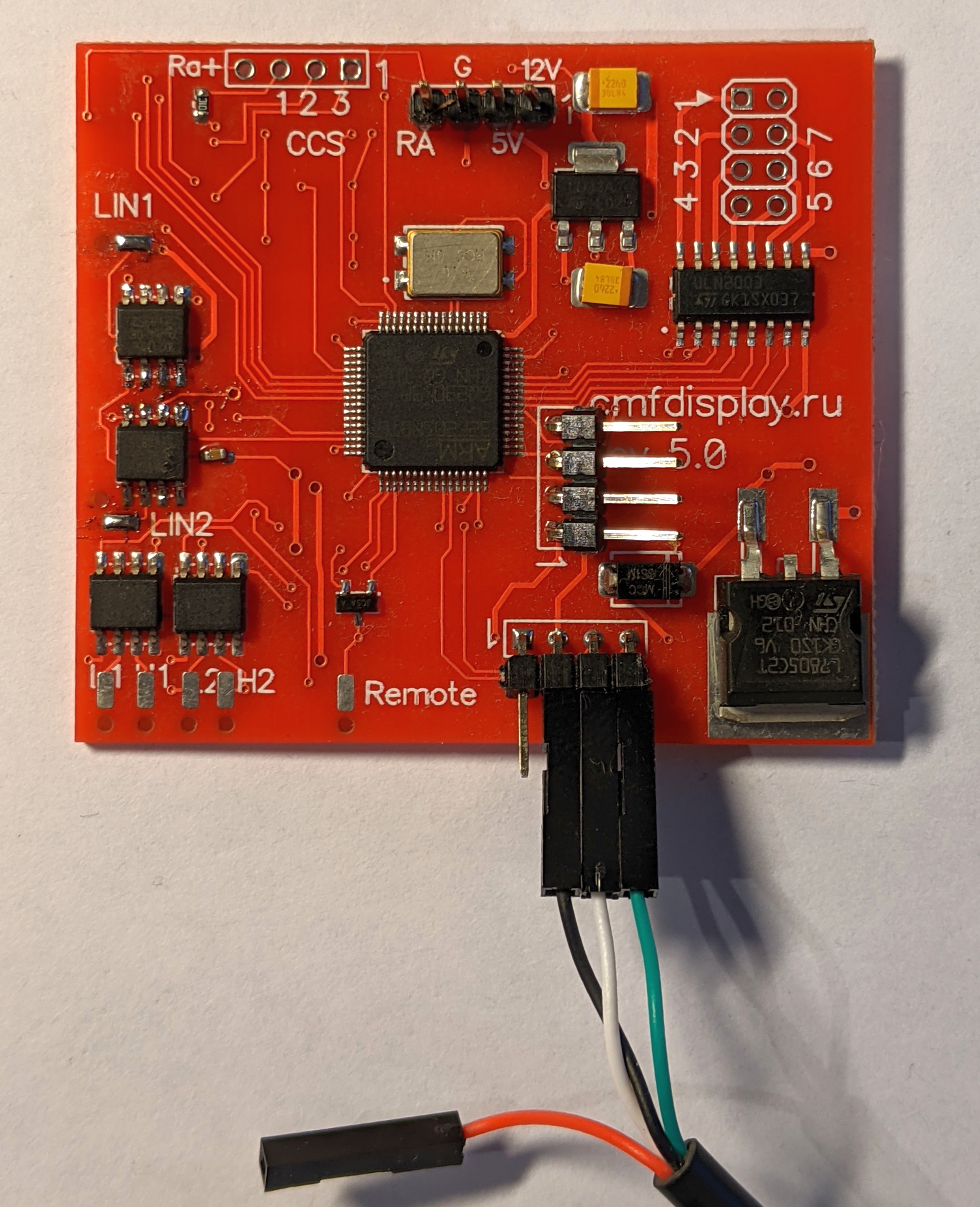
7 USB
предназначен для подключения шнурка с помощью которого осуществляется связь адаптера с компьютером, подключение проводов шнура производит согласно рис 3. Красный провод не используется, но с помощью его можно запитать плату в технологическом режиме "на столе", для прошивки или настройки адаптера.
8. Выходы для Круиз контроля
Три выхода предназначены для подачи сигналов КК напрямую на ЭБУД двигателя
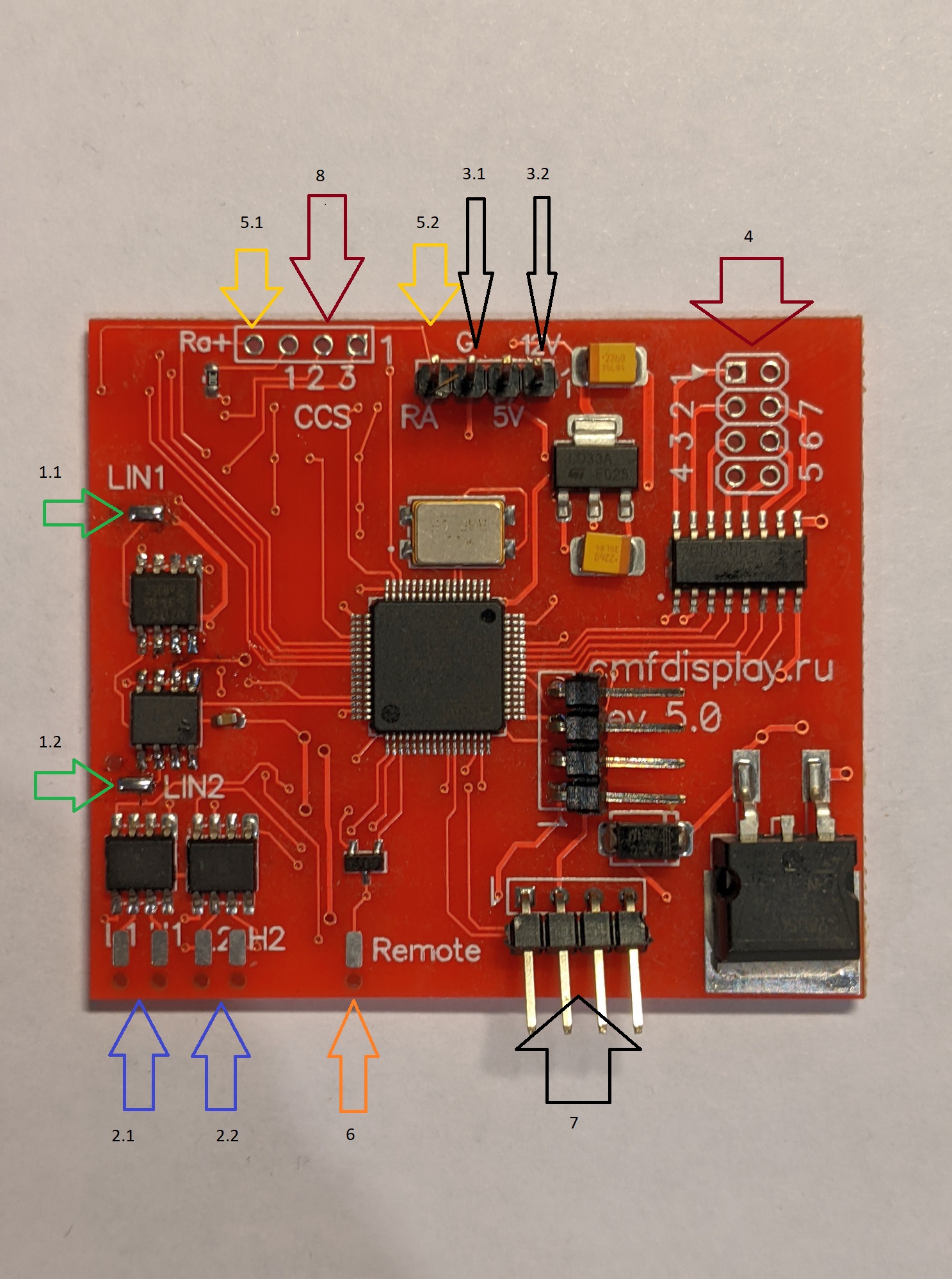
Схема подключения шнурка USB